มอเตอร์ซิงโครนัสแม่เหล็กถาวรความเร็วต่ำป้องกันการระเบิด IE5 660-1140V TBVF



ข้อมูลจำเพาะผลิตภัณฑ์
| เครื่องหมาย EX | EX db I Mb |
| แรงดันไฟฟ้าที่กำหนด | 660,1140โวลต์... |
| ช่วงกำลังไฟฟ้า | 37-1250 กิโลวัตต์ |
| ความเร็ว | 0-300 รอบต่อนาที |
| ความถี่ | ความถี่แปรผัน |
| เฟส | 3 |
| ชาวโปแลนด์ | โดยการออกแบบทางเทคนิค |
| ช่วงเฟรม | 450-1000 |
| การติดตั้ง | บี3,บี35,วี1,วี3..... |
| เกรดการแยกตัว | H |
| เกรดการป้องกัน | IP55 |
| หน้าที่การทำงาน | S1 |
| ปรับแต่งได้ | ใช่ |
| วงจรการผลิต | 30 วัน |
| ต้นทาง | จีน |
คุณสมบัติผลิตภัณฑ์
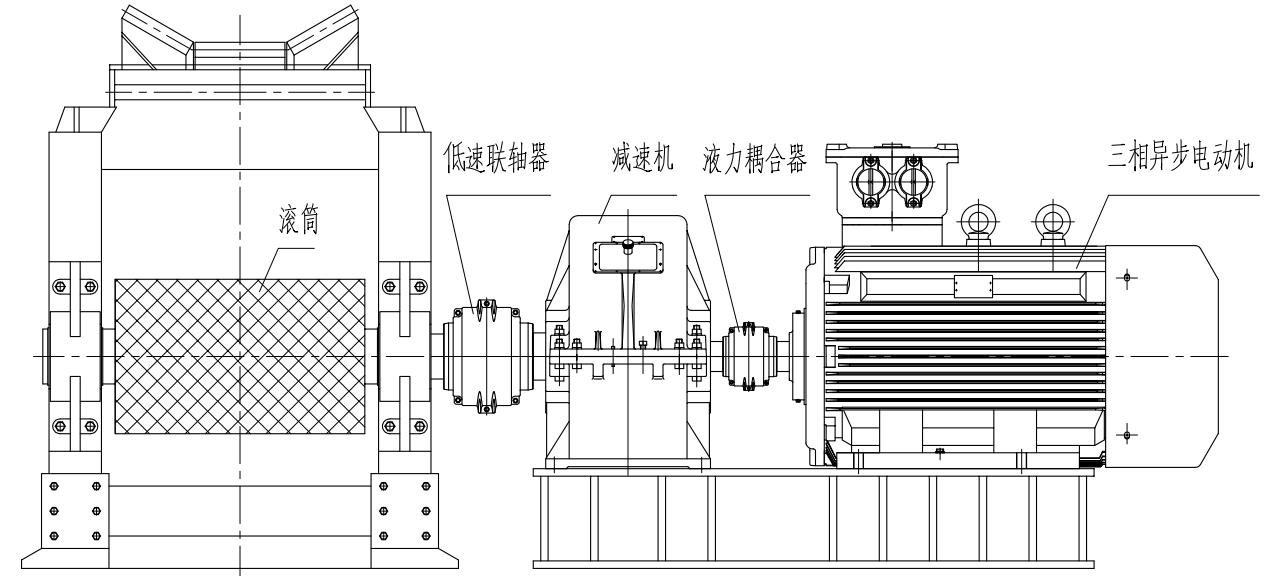
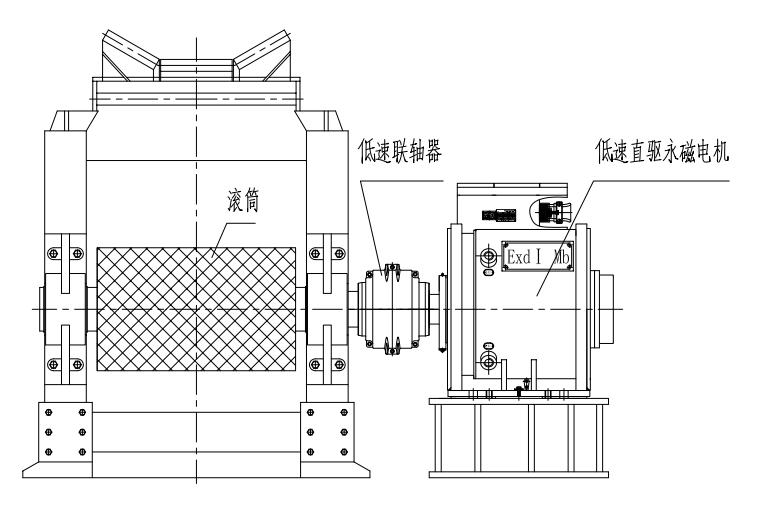
1. กำจัดกระปุกเกียร์และข้อต่อไฮดรอลิก ทำให้โซ่ส่งกำลังสั้นลง ไม่มีปัญหาการรั่วไหลของน้ำมันและการเติมน้ำมัน อัตราความล้มเหลวทางกลไกต่ำ ความน่าเชื่อถือสูง
2. การออกแบบแม่เหล็กไฟฟ้าและโครงสร้างที่กำหนดเองตามอุปกรณ์ ซึ่งสามารถตอบสนองความต้องการความเร็วและแรงบิดที่โหลดต้องการได้โดยตรง
3. กระแสเริ่มต้นต่ำและอุณหภูมิที่เพิ่มขึ้นต่ำ ขจัดความเสี่ยงจากการทำลายสนามแม่เหล็ก
4. ขจัดการสูญเสียประสิทธิภาพการส่งกำลังของชุดเกียร์และข้อต่อไฮดรอลิก ระบบนี้มีประสิทธิภาพสูง ประหยัดพลังงาน และมีโครงสร้างเรียบง่าย เสียงรบกวนในการทำงานต่ำ และต้นทุนการบำรุงรักษารายวันต่ำ
5. ชิ้นส่วนโรเตอร์มีโครงสร้างรองรับพิเศษ ซึ่งทำให้สามารถเปลี่ยนตลับลูกปืนได้ในสถานที่ ช่วยขจัดต้นทุนด้านโลจิสติกส์ที่จำเป็นสำหรับการส่งกลับไปยังโรงงาน
6. การใช้ระบบขับเคลื่อนตรงของมอเตอร์ซิงโครนัสแม่เหล็กถาวรสามารถแก้ปัญหา "ม้าตัวใหญ่ลากเกวียนเล็ก" ได้ ซึ่งสามารถตอบสนองความต้องการการทำงานที่มีช่วงโหลดกว้างของระบบเดิม และปรับปรุงประสิทธิภาพโดยรวมของระบบ ด้วยประสิทธิภาพสูงและประหยัดพลังงาน
7. ใช้การควบคุมตัวแปลงความถี่แบบเวกเตอร์ ช่วงความเร็ว 0-100% ประสิทธิภาพการสตาร์ทดี การทำงานมีเสถียรภาพ สามารถลดค่าสัมประสิทธิ์การจับคู่กับกำลังโหลดจริงได้
การประยุกต์ใช้ผลิตภัณฑ์
ผลิตภัณฑ์นี้สามารถขับเคลื่อนอุปกรณ์เหมืองถ่านหินโดยตรง ซึ่งใช้กันอย่างแพร่หลายใต้ดินเพื่อลากอุปกรณ์ต่างๆ เช่น พัดลม ปั๊ม และเครื่องจักรสายพาน






คำถามที่พบบ่อย
จุดสำคัญในการเลือกมอเตอร์ความเร็วต่ำ (rpm) มีอะไรบ้าง?
1. โหมดการทำงานในสถานที่:
เช่น ประเภทของโหลด สภาพแวดล้อม เงื่อนไขการทำความเย็น ฯลฯ
2. องค์ประกอบและพารามิเตอร์ของกลไกการส่งกำลังดั้งเดิม:
เช่น พารามิเตอร์ป้ายชื่อของตัวลด ขนาดอินเทอร์เฟซ พารามิเตอร์เฟือง เช่น อัตราส่วนฟันและรูเพลา
3. เจตนาที่จะปรับปรุงใหม่:
โดยเฉพาะอย่างยิ่งไม่ว่าจะใช้ระบบขับเคลื่อนตรงหรือกึ่งตรง เนื่องจากความเร็วมอเตอร์ต่ำเกินไป จึงจำเป็นต้องใช้ระบบควบคุมแบบวงปิด และอินเวอร์เตอร์บางรุ่นไม่รองรับระบบควบคุมแบบวงปิด นอกจากนี้ ประสิทธิภาพมอเตอร์ยังต่ำกว่า ในขณะที่ต้นทุนมอเตอร์สูงกว่า แต่ความคุ้มค่ากลับไม่สูงนัก ข้อดีของการปรับปรุงนี้คือความน่าเชื่อถือและไม่ต้องบำรุงรักษา
หากต้นทุนและความคุ้มทุนมีความสำคัญมากกว่า ก็ยังมีเงื่อนไขบางประการที่โซลูชันระบบขับเคลื่อนกึ่งตรงอาจเหมาะสมในขณะที่ยังรับประกันการบำรุงรักษาที่ลดลงอีกด้วย
4. การควบคุมความต้องการ:
จำเป็นต้องมีแบรนด์อินเวอร์เตอร์หรือไม่ จำเป็นต้องมีวงจรปิดหรือไม่ ระยะการสื่อสารระหว่างมอเตอร์กับอินเวอร์เตอร์ควรติดตั้งตู้ควบคุมอิเล็กทรอนิกส์หรือไม่ ตู้ควบคุมอิเล็กทรอนิกส์ควรมีฟังก์ชันใดบ้าง และสัญญาณการสื่อสารใดบ้างที่จำเป็นสำหรับ DCS ระยะไกล
ความแตกต่างหลักระหว่างการสูญเสียของมอเตอร์แม่เหล็กถาวรที่มีขนาดเท่ากันเมื่อเทียบกับมอเตอร์อะซิงโครนัสคืออะไร
การใช้ทองแดงสเตเตอร์ต่ำ การใช้ทองแดงโรเตอร์ต่ำ และการใช้เหล็กโรเตอร์ต่ำ





